点击下方卡片,关注“自动驾驶之心”公众号
>>
点击进入→自动驾驶之心技术交流群
本文只做学术分享,如有侵权,联系删文
-“每年营收都过亿。”
-“副产品。”
在回答“小马智卡怎么样了”的话题时,小马智行副总裁、小马智卡事业部负责人李衡宇,给出了这样回答。
这不是回答的全部。李衡宇更完整的回答,其实是技术、场景和车辆,还带了一些这两年来自动驾驶卡车货运相关的政策法规推进。
而“每年营收都过亿”只是额外提到的信息点,按照李衡宇的说法,对外都没有说过,“毕竟这只是一个副产品”,在小马智行的逻辑里,更宝贵的还是线路、场景、数据和它能够探知到真正客户的需求。
因为只有围绕上述关键要素,自动驾驶卡车货运,才会实现从量变到质变的跃迁,从技术到商业的飞轮闭环,真正来到自动驾驶的涌现时刻。
如同大模型范式的变革,历经了GPT1、2、3,直到GPT-3.5驱动的ChatGPT展现智能涌现,才让所有人因为看见而相信。
小马智卡也好、小马智行也好,最新传递出的就是这样的春江水暖——
跃迁节点、涌现时刻,已在眼前。

小马智卡最新进展?
小马从技术、场景和车三大部分来回答。
首先,技术上。
自动驾驶里程规模近500万公里,自动驾驶路线日常运行单程突破2000公里——中国最长;可以连续6小时无接管——世界最长公开纪录。
其次,场景。
200+台卡车在役——中国最大自动驾驶卡车车队,还成立了首家自动驾驶物流合资公司青骓物流,通过L4级自动驾驶商业货运总重突破了2000万吨公里。货运网络覆盖全国,北至漠河,南抵深圳,东起上海,西达阿拉山口。
第三,车辆相关。

三代车已经在2022年下线,2023年开始批量交付合作量产的智能重卡。
最后,这4年来的政策法规推进。

目前已经来到了编队无人自动驾驶许可的里程碑节点。
之所以专门谈到了政策法规,核心是小马智卡在实践中,深切感知到这可以是外界观测自动驾驶落地的一个重要参考——在我国负责任的自动驾驶落地推进中,往往都是第一梯队玩家技术上稳定了,法规许可就会相应跟上。
所以小马智行认为,目前从自动驾驶卡车技术上而言,已经来到了一个无人化、去安全员的关键节点。
这个节点,也是自动驾驶卡车大规模商业化、技术到商业飞轮闭环的分水岭节点。
因为一旦开启无人化,成本省、利润出,再乘以规模效应,一切将是全新的局面。
一战定终局。

小马智行对自动驾驶卡车货运的阶段划分
在小马智行,实现自动驾驶卡车大规模应用的步骤,并非不能对外公开。
大道至简,不算秘诀,总共四步。
第一步,Demo。
第二步,技术验证,PoC。
第三步,有安全员的小规模商业运营。
第四步,无安全员的大规模商业运营。
然后抵达终点。
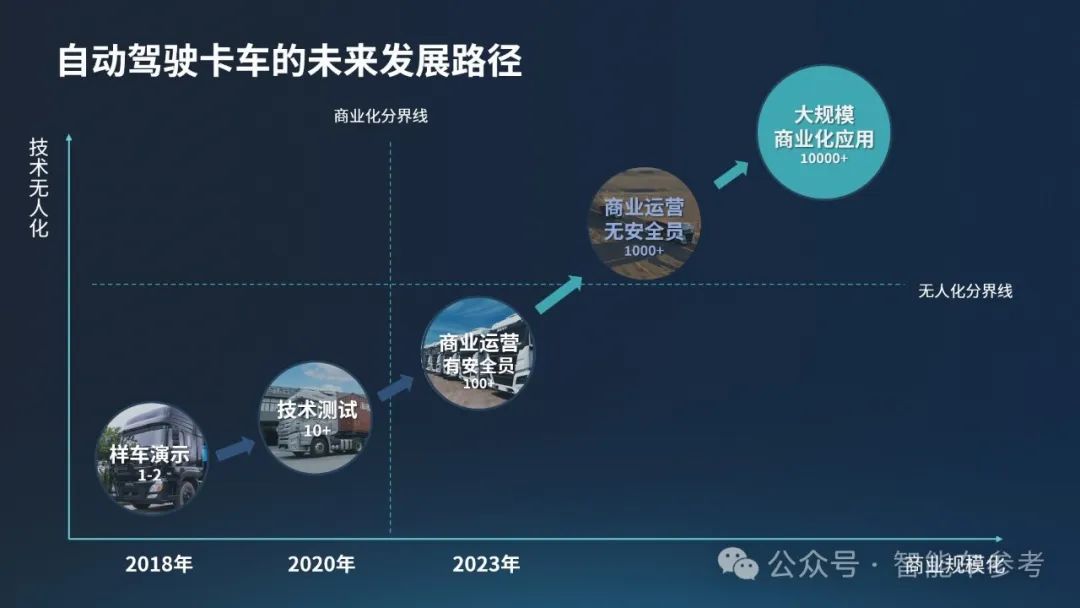
其中第二步到第三步,从技术验证到小规模商用,是商业化的分水岭。
但第三步到第四步,从有安全员的商用运营到无安全员的商用运营,才是真正的技术决战,是自动驾驶的硬指标——要跨越无人化分界线。
行至第四步门口,小马智卡总共用了5年。

2018年8月,内部以小团队启动了小马智卡的从0到1。
据参与者贺星(小马智行智慧物流总经理、广州研发中心副总经理)回忆,最初是3个人,后来增加到6个人,完全从0开始,从认识卡车开始,以广州一个物流园区的卡车集装箱作为“办公室”,用了4个月,实现了小马智卡第一台改装车在广州30公里的高速全闭环自动驾驶。
也是这种兵贵神速,当时一举轰动江湖,被认为“小马过河,降维打击”,甚至一度影响到了其他自动驾驶卡车公司的融资和估值。
但在小马内部,感慨的是两条腿走路的可能性和可行性,因为小车和卡车,实践证明可以有80%的底层技术共享。
剩下的20%,则需要结合卡车和载货场景,做更深入的落地。
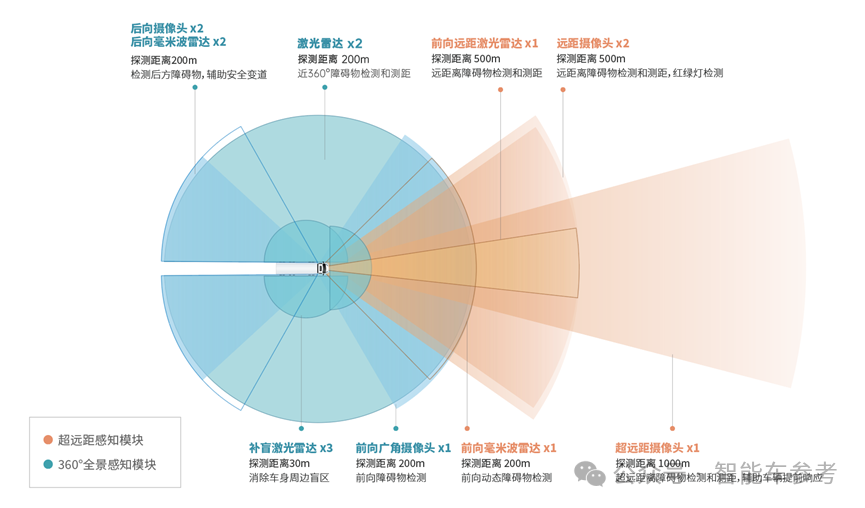
于是小马开启了第二阶段征程,首先选车——特别是线控底盘,选定了解放J7线控底盘;其次是自动驾驶硬件方案,针对卡车做了适配,目前形成了包括1个超长距摄像头、2个长距摄像头、1个量产车规级长距激光雷达、1个远距毫米波雷达、360°全景感知模组的方案。
也是在2020年,小马智卡(PonyTron)作为独立事业部正式对外推出。
技术实现验证后,小马智卡便开启了第三阶段发展——有安全员的小规模商业化运营。
这个阶段最核心的方法,就是从货运生态维度构建黄金三角。
2022年,技术方的小马智卡、物流场景方的中国外运,重卡制造方的三一集团,缔结战略联盟,闭环推进自动驾驶物流商用。

也是在这种三角生态下,小马和三一开始量产智能重卡,其后用于中国外运场景中的物流需求。
这也是小马智卡最新成绩成果中,200辆重卡、150万公里商用里程、2000万吨公里货运的前提条件和核心工程所在。
而现在,随着黄金三角模式的成熟验证,抵达终局的第四阶段跃迁,已经来临了。
换句话说,这也是自动驾驶卡车货运即将来到的“涌现时刻”。
ChatGPT时刻。
自动驾驶卡车货运,ChatGPT时刻将至
这个时刻,会让所有人清晰看到自动驾驶卡车货运的技术实力、商业潜力,扫清大规模落地的核心阻碍。
做好两个方面:
第一,技术上,从有人到无人。
第二,运营上,极端情况下的保障。
小马智卡目前都已经思路清晰地分别提出了工程化对策。
技术上,冗余、冗余,再冗余。

从线控底盘、自动驾驶硬件到自动驾驶软件,都做到了时间检验、实践检验,以及方案冗余。
无人化,在技术上已经蓄势待发。
政策上,也给这种万事俱备不断带来许可:广州市自动驾驶卡车编队行驶、获准在北京开启自动驾驶卡车商业化运营、国内跨省自动驾驶重卡许可……一系列首个都颁向了小马智卡(考试考核后)。
运营上,小马智卡也找到了最优解。
一是找到了大宗商品的运输场景,运钢、运煤,刚需高频,路线场景天然适合自动驾驶。
二是编队自动驾驶,1+N的模式,既能直接节省跟随车辆的人力成本,还可以在特殊场景下脱困,最后还能实现编队运营,降低风阻,进一步经济降本。

小马智卡认为,这就是他们在技术和商业两端,实现自动驾驶卡车里程碑式跨越,最后抵达Robotruck终局的关键路径。
这也是与小车面向Robotaxi终局不同之处,Robotaxi采用编队方式不太可行,而Robotruck,编队则是关键工程。
关山此越,小马长成。
作为小马智行的创始成员,李衡宇透露,不论是小马智行还是小马智卡,从一开始就是以终为始来推进工作的,对于每一年做什么,他们太清楚方向了。
对于他们来说,自动驾驶创业,一直是一项技术工程,目标清晰,路径可循,难的只是前无古人,每一个坑都要踩过才知道。
但这也是小马智行工程师的核心动力之一。
2016年创办以来,他们每天都在朝着“让人类司机下车”前进一点点。

Pony.ai有近忧吗?
当然,不是每一家拥有伟大使命的创业公司,都能在终局里接受表彰。
在前沿科技领域,AI一日,人间一年,变化和突破实在太快太迅猛了。
小马智行内部有担忧吗?
比如量产自动驾驶一派的升维攻坚开始了,马斯克已经给出了Robotaxi车型发布时间点,国内智能驾驶遥遥领先的玩家,也开始了城区NoA的争夺中,开启Robotaxi征程……
还有大模型技术对AI范式的革新,对过去的AI司机技术范式是否存在颠覆?
在最近的对外分享中,小马智行也给出了回应。
对于智能驾驶和自动驾驶,他们引用了教主楼天城的常用回答——种豆得豆,种瓜得瓜。
智能驾驶的豆,长不出自动驾驶的瓜。
李衡宇补充了更具逻辑的说明,这种结果从出发点上就决定了,智能辅助驾驶的精进是为了帮助人类有更好的驾驶体验,自动驾驶的迭代则是为了让人不再驾驶。
“辅助驾驶越先进,距离无人驾驶就越远。”
这种判断,实际之前被更多人关注到的是权责,既然自动驾驶一定有事故的概率,那出了事故究竟责任在谁?智能驾驶明确是驾驶者,自动驾驶则是系统提供方。
所以即便智能驾驶已经卷出了“有导航就能开”、“有路就能开”的地步,但不论如何卷,至今也只有奔驰敢喊一句“出事故找我”——前提是符合要求下的事故。
那是否存在另一种技术上的可能,大模型范式、Transformer架构、端到端模式对当前自动驾驶技术栈实现颠覆式重构?
李衡宇和贺星都摇了头。
他们不是认为新技术没有这种可能性,他们只是认为这对他们不构成影响,因为他们并不站在对立面——
所有的技术对小马智行来说,都是实现目标的手段。
“什么方法可以让我们的安全性是人的10倍,我们就用什么样的方法”,Transformer好就上Transformer,端到端可以结合问题就端到端,大模型高效就大模型,不执着于具体的某一项技术,关键是最好地解决问题。
“目标就在那里,我们对结果负责。”
投稿作者为『自动驾驶之心知识星球』特邀嘉宾,欢迎加入交流!
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、大模型与自动驾驶、Nerf、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

网页端官网:www.zdjszx.com② 国内首个自动驾驶学习社区
国内最大最专业,近3000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型、端到端等,更有行业动态和岗位发布!欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频

③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦感知、定位、融合、规控、标定、端到端、仿真、产品经理、自动驾驶开发、自动标注与数据闭环多个方向,目前近60+技术交流群,欢迎加入!
自动驾驶感知:目标检测、语义分割、BEV感知、毫米波雷达视觉融合、激光视觉融合、车道线检测、目标跟踪、Occupancy、深度估计、transformer、大模型、在线地图、点云处理、模型部署、CUDA加速等技术交流群;
多传感器标定:相机在线/离线标定、Lidar-Camera标定、Camera-Radar标定、Camera-IMU标定、多传感器时空同步等技术交流群;
多传感器融合:多传感器后融合技术交流群;
规划控制与预测:规划控制、轨迹预测、避障等技术交流群;
定位建图:视觉SLAM、激光SLAM、多传感器融合SLAM等技术交流群;
三维视觉:三维重建、NeRF、3D Gaussian Splatting技术交流群;
自动驾驶仿真:Carla仿真、Autoware仿真等技术交流群;
自动驾驶开发:自动驾驶开发、ROS等技术交流群;
其它方向:自动标注与数据闭环、产品经理、硬件选型、求职面试、自动驾驶测试等技术交流群;
扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)