1、京都大学最新研究 开发出控制气动人造肌肉的方法
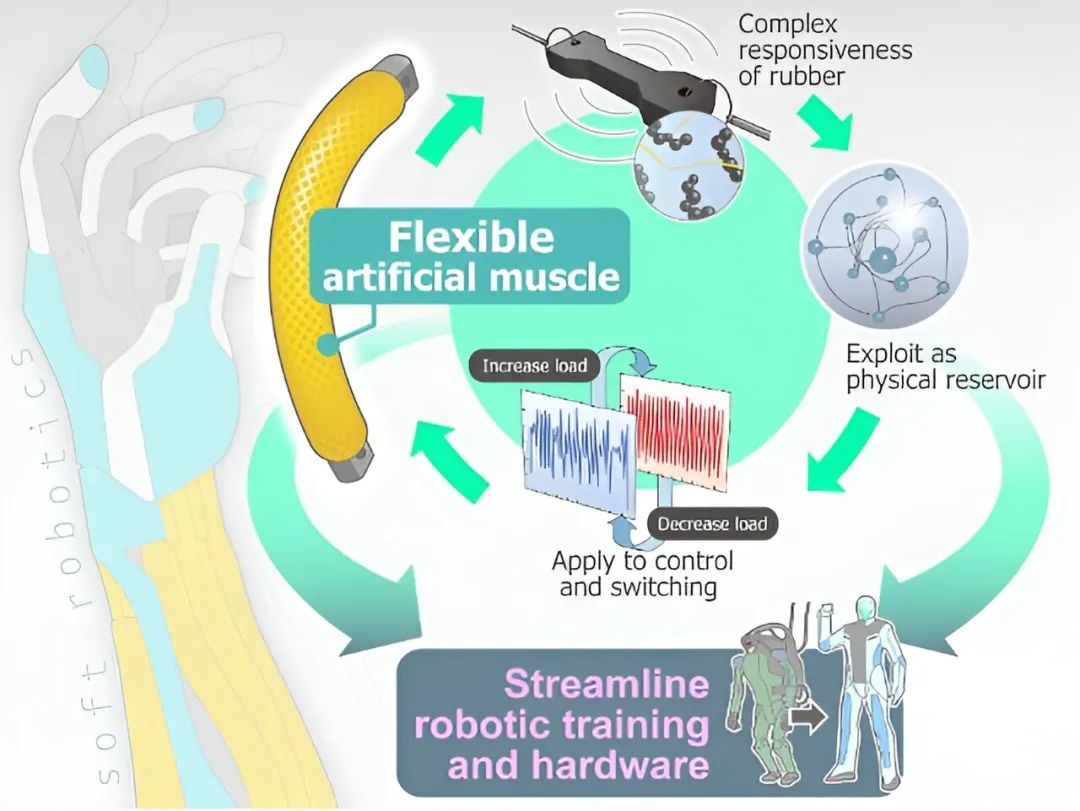
京都大学联合东京大学及普利司通公司,在软体机器人控制技术方面取得突破。该团队开发了一种控制气动人工肌肉的方法,利用软性机器人执行器的丰富动态作为计算资源。研究成果已在《先进科学》杂志发表。京都大学信息学研究生院的Nozomi Akashi指出,该技术使致动器能自主产生包括有节奏模式和混沌在内的各种动态。东京大学信息科学与技术研究生院的Kohei Nakajima提到,改变模式的分叉结构可嵌入机器人致动器本身,这为开发更具适应性和灵活性的机器人运动模式提供了可能。Akashi总结,该技术可简化硬件和软件开发流程,提高开发效率和效果。

2、莱斯大学学生团队开发基于燃料电池的遥控水下机器人

莱斯大学学生团队开发了一种遥控水下机器人,该机器人利用分水燃料电池控制浮力,为水下作业提供了一种新的省力方法。这一技术能够显著降低遥控或自主水下航行器(AUV)的运行成本,适用于环境监测、海洋学研究、军事和工业任务。该机器人基于莱斯大学和休斯顿大学研究人员的学术论文,通过电解水产生氢气和氧气来控制浮力,模仿鱼类的鱼鳔,从而实现更安静、节能的运行。
3、EPFL研究人员开发出新型3D打印弹性体墨水

洛桑联邦理工学院(EPFL)的研究团队开发了一种基于弹性体的3D打印墨水,用于制造具有不同机械性能的软体机器人和致动器。该技术通过3D打印实现物体局部刚度和韧性的调整,解决了传统软体设备笨重机械接头的问题。利用DNGE技术,研究人员打印出了一个带有刚性“骨头”和柔性“肉”的“手指”原型,展示了其在制造灵活且坚固的设备方面的潜力。该技术的关键创新在于两个独立微调的弹性网络,它们共同决定了结构的刚度和韧性。与传统水凝胶相比,使用弹性体制造的结构更稳定,且可利用市面上的3D打印机实现。这项研究为软体机器人和可穿戴设备的设计提供了新的可能性,其成果已发表在《先进材料》杂志上。
4、加州大学伯克利分校利用仿真强化学习训练机器人执行日常任务

美国加州大学伯克利分校的机器人专家小组在《科学机器人学》杂志上发表研究,展示了通过仿真强化学习训练机器人执行简单日常任务的可能性。研究团队通过在模拟环境中提供数十亿个示例,并采用奖惩系统,训练名为Digit的机器人在未知小镇区域导航、恢复平衡、携带负荷和执行物品搬运等任务。该方法不仅提升了机器人在陌生环境中的行走能力,还增强了其在遭受干扰时的稳定性。研究人员认为,将仿真强化学习应用于真实世界环境,如家庭、办公室或工厂,将使机器人在实际应用中更加有用。
5、浙江大学研发双向扭转能力的软执行器
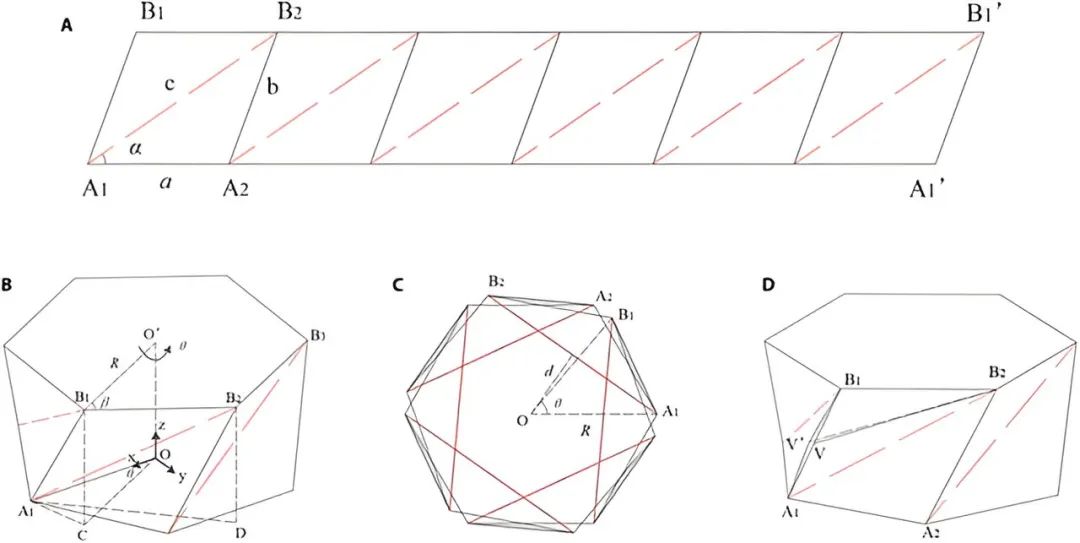
浙江大学的研究团队开发了一种腕式启发磁气混合驱动软执行器,该执行器基于克瑞斯林折纸单元,能够实现双向扭转运动,从而克服了人手腕在执行复杂操作任务时的旋转角度限制。该团队在《生化人与仿生系统》杂志上发表了他们的研究成果,并建立了运动学和准静态机械分析模型以预测致动器的行为。通过重新设计克瑞斯林折痕图案,研究人员实现了双向弯曲,并通过实验验证了致动器的稳定性和双向扭转变形能力。该软执行器的设计独特,能够通过一个模块实现较大的旋转角度,且具有更强的扭转运动能力,为软体机器人在复杂操作任务中的应用提供了新的可能性。
如需咨询企业合作事宜,欢迎联系堂博士(13810423387,手机与微信同号)进行对接。
----------------END----------------欢迎加入【机器人大讲堂】读者讨论群,
共同探讨机器人相关领域话题,共享前沿科技及产业动态。
教育机器人、医疗机器人、腿足机器人、工业机器人、服务机器人、特种机器人、无人机、软体机器人等专业讨论群正在招募,添加微信“robospeak2018”入群!
机器人大讲堂正在招募【兼职内容作者】,如果您对撰写机器人【科技类】或【产业类】文章感兴趣,可以将简历和原创作品投至邮箱:liuzk@leaderobot.com
我们对职业、所在地没有要求,欢迎朋友们的加入!






