
原文标题:Technically Speaking: Using Machine Learning to Map Roadways Faster
原文作者:Dhananjai Sharma,机器学习高级工程师
编译:auto_driver
审核:Los
本文揭秘了Motional顶尖技术团队如何使用机器学习快速构建道路地图,其将构建城市地图所需的时间从几周缩短到几天,旨在能够更快地开始为新城市的乘客提供服务。©️【深蓝AI】编译

在去年冬天,拉斯维加斯下了一场大雪,它在该地区的道路上短暂地形成一层覆盖,遮挡了车道标线甚至停车标志。然而,一层薄薄的雪不会让每天沿着拉斯维加斯大道上行驶的自动驾驶出租车队暂停营业。每辆汽车的车载计算机包含了其运营区域的详细地图,包括每个交通信号灯、停止线和自行车道,从而使自动驾驶出租车即使在车道线和道路标记被遮挡的情况下也能够安全运营。当来到一个新的城市时,定位建图是首要任务之一。Motional构建了具有厘米级精度的驾驶环境高精地图,辅助汽车理解它在哪里,周围是什么,以及下一步应该移动到哪里。但是构建这些庞大、数据量繁重的地图目前需要大量的时间和资源。根据道路的英里数、结构和路口等细节,构建美国等中等城市的高精地图可能需要耗费数月时间。此外,高精地图的精度很重要,这是因为地图提供了自动驾驶汽车做出安全决策的基本细节信息。如此长的时间跨度将给那些希望快速扩大商业化无人驾驶出租车业务的公司带来巨大阻力。Motional正在使用基于机器学习的技术来加快这一过程,将构建城市地图所需的时间从几周缩短到几天,并且使Motional能够更快地开始为新城市的乘客提供服务。
自动驾驶汽车从其装载的各种传感器(例如激光雷达、相机、雷达等)采集大量数据。这些传感器有助于生成关于车辆运营区域的高精度几何和语义信息。几何地图包含表示城市三维信息的点云,例如建筑物、路缘、天桥和其它临街结构。语义地图包含行驶车道、道路边界和交通信号灯等详细信息。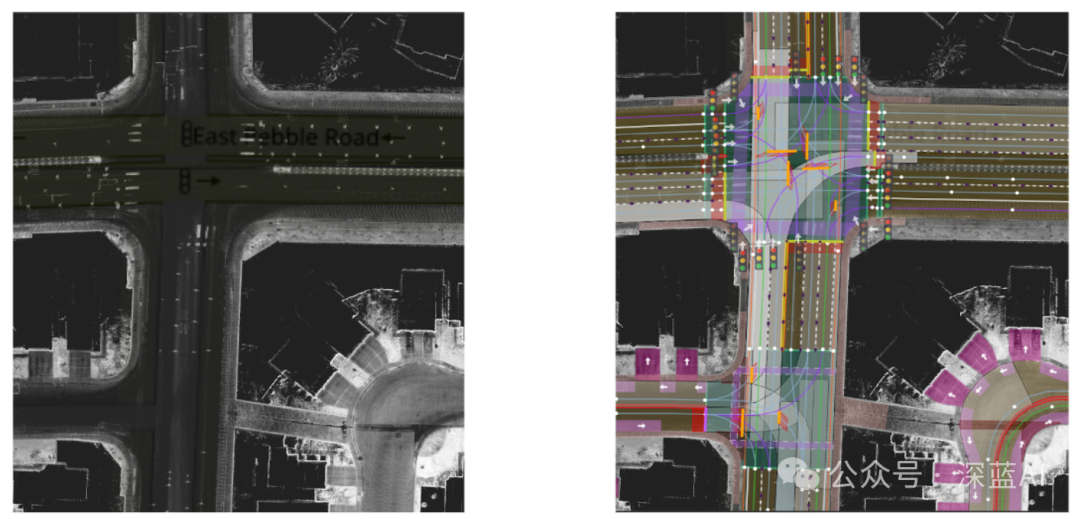
▲图1|几何地图(左图)展示了道路信息,例如路缘、建筑物、天桥和车道;语义地图(右图)位于几何地图的顶部,描述了车道、交通信号灯等©️【深蓝AI】编译
如今,语义地图中的细节信息被放置在几何地图的顶部,主要是由人工标注人员完成的,他们确保所有数据点都是对齐的,并且路缘坡和转弯半径是精确的。地图中的任何精度不足都可能影响自动驾驶汽车在道路上的行为,例如定位较差。目前存在一些研究方向探索无地图驾驶,但是为了增加自动驾驶成功的机会,Motional认为使用高精地图是最好的方法。Motional使用机器学习来促进新城市高精地图的构建。首先使用自动驾驶汽车(目前由训练有素的人类驾驶员操作)采集新城市的传感器数据,然后进行数据验证,从而消除明显的数据差异和异常值。接着,分别使用基于机器学习的图像和点云分割技术来标注数据中的像素和点云,这些是使用先前城市的数据构建的。●标签使得可以删除对应于动态目标(汽车、行人等任何移动的目标)的点,并保留静态目标(路缘、建筑物、树木等)。●这些标签有助于在构建几何地图时进行回环检测。当路标被标记后,自动驾驶汽车能够更容易地识别先前经过的路标。
●这些标签能够作为先验信息传递给任何下游的机器学习模型,为Motional的持续学习框架提供额外的可查询数据。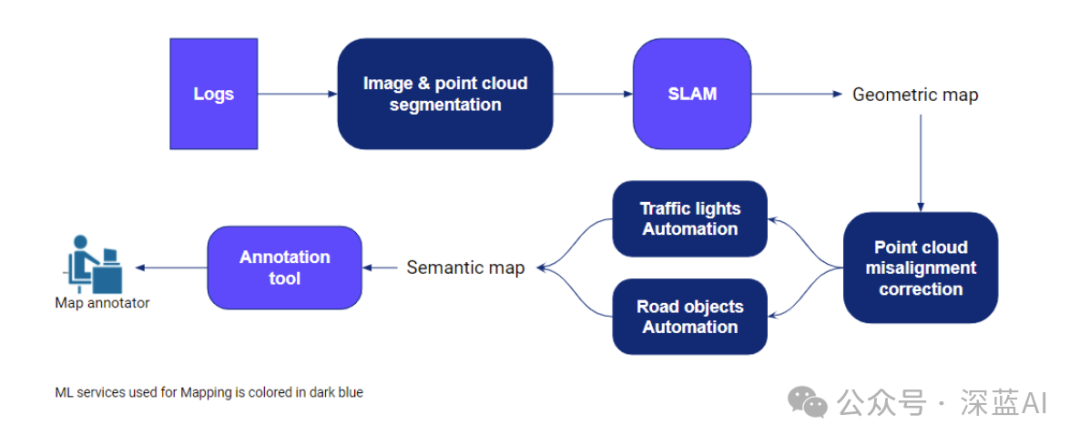
▲图2|本图展示了Motional如何将基于机器学习的服务(深蓝色表示)集成到建图过程中©️【深蓝AI】编译

Motional使用图SLAM(同时定位和建图)技术和标注的传感器数据来构建几何地图。因为即使在运行SLAM算法后,点云误对齐问题仍然可能存在,故而Motional构建了一个机器学习驱动的模型,以在最终构建几何地图之前识别并且修正这些误差。由于地图往往很大,因此难以在内存限制之内执行整个城市地图的机器学习推理。相反,机器学习工程师在一部分地图上推理模型预测,然后将它们组合在一起。Motional还自动化了几何地图中交通信号灯的标注以及其它道路目标(例如路缘、车道、天桥和交通路障)的标注。Motional通过采用经典的计算机视觉和机器学习这两步过程来实现这一点。首先,使用基于机器学习的目标检测器来识别图像中的交通信号灯。然后,将3D点投影到图像上,并且选择与交通信号灯对应的点。将所选的点经过仔细处理以形成交通信号灯簇,这些簇在时间上连续关联以进行优化。地图以若干方式辅助自动驾驶汽车。预先存储的车道信息有助于规划模块,确保车辆保持在行驶车道内,并且遵守交通规则,即使车道标线被遮挡。在线检测到的交通信号灯可以与地图上的交通信号灯相匹配,为车辆提供环境感知。如果它们不存在于地图上,车辆就可能会错过交通信号灯。
▲图3|建图确保了Motional的自动驾驶汽车能够了解重要的道路细节信息,例如交通信号灯的位置©️【深蓝AI】编译
Motional的机器学习模型在云端运行,以实现可扩展性。尽管自动驾驶汽车的设备齐全,足以采集数据,但是我们更倾向于将有限的计算资源分配给核心的自动驾驶功能。通过将建图任务转移到云端,可以更少受到延迟约束的限制,并且在测试模型架构时有更多的自由空间来优先考虑模型的准确性。
在质量把控过程中,标注人员仍然可以生成建图标签。如果标注人员对机器学习生成的标注结果不满意(也许预测的车道划分与道路上的实际车道划分不一致),他们就能调整标签,从而提供有价值的持续学习反馈,并且改进机器学习模型。根据最新的内部研究,发现使用一种类型的机器学习工具可以将标注人员添加语义信息所需的时间减少21%。▲图4|Motional自动驾驶出租车的相机图像显示出道路车道标记几乎完全磨损。然而,由于先前的建图操作,自动驾驶汽车仍然知道车道在哪里©️【深蓝AI】编译
自动驾驶有可能彻底改变出行方式。但是,只有自动驾驶技术能够顺利、快速、安全地推广到新的城市,这才可能实现。在理想的场景下,建图流程应该是一个即插即用的系统,即使用Motional自动驾驶出租车的原始传感器数据来快速生成精确且详细的地图。注意到这一点,Motional目前正在开发突破性的机器学习技术来增强建图。一旦经过标注人员充分训练,基于机器学习的建图模块就应该能够将构建城市地图所需的时间从几周减少到几天,从而使Motional能够更快地开始为新城市的乘客提供服务。
【深蓝AI】长期招募作者,欢迎各位想要把自己的科研技术经历及体会转化成文字,分享给更多人阅读交流~如想加入,请点击下方推文了解详情👇
【深蓝AI】的原创内容均由作者团队倾注个人心血制作而成,希望各位遵守原创规则珍惜作者们的劳动成果,转载请私信后台进行授权,发文时务必注明出自【深蓝AI】微信公众号,否则侵权必究。
*点击在看收藏并推荐本文*

点击阅读原文直通论文









