深度学习与SLAM的结合有很多好处。首先,深度学习可以帮助SLAM系统更好地理解环境,提高定位和建图的准确性。例如,深度学习可以用于特征提取和匹配,以提高SLAM系统的鲁棒性。此外,深度学习也可以用于预测环境的变化,从而提高SLAM系统的适应性。目前有几个主要的方向:
1、语义SLAM:通过深度学习,SLAM系统可以理解环境的语义信息,如识别物体和场景,从而提高定位和建图的准确性。
2、端到端的SLAM:整个SLAM过程(包括特征提取、匹配、定位和建图)都由一个深度学习模型完成。这种方法的优点是可以直接从数据中学习SLAM,而不需要手动设计特征和算法。
3、深度学习的优化:深度学习需要大量的计算资源,这对于实时的SLAM系统来说是一个挑战。因此,如何优化深度学习模型,使其在有限的计算资源下运行,是一个重要的研究方向。
这不,「小六的机器人SLAM圈」又有干货上新啦!视频17讲《深度学习SLAM论文解读》已上线!带领大家精读论文,感谢学习小组的同学们分享!内容涉及:
- 第08讲--Deep Patch Visual Odometry论文分享
- 第09讲--- 基于transformer的特征匹配方法
- 第16讲-张端到端视觉SLAM之最佳论文解读DROID-SLAM
学习小组的小伙伴绘制了非常详细的思维导图并进行了视频讲解:
基于深度学习的SLAM综述
深度学习在VSLAM中应用
动态环境SLAM综述
现已经全面上线!所有知识星球的会员均可免费学习!此外,GTSAM优化库解读、《计算机视觉中的多视图几何》精讲后续也会陆续上线,我们星球里目前已经有十几个主题,200+系列视频教程,涉及:
- 带读书:《视觉SLAM十四讲》、《机器人学中的状态估计》、《多视图立体几何》
- 深入了解第三方库:OpenCV、PCL、G2O、GTSAM、Ceres-solver
- 开源框架学习:R3LIVE、LVI-SAM、FAST-LIO2、GVINS、TANDEM

长按二维码,加入即可开始学习~3天内无条件退款
购买后务必加客服领取其他权益和加交流群
现在加入免费送近千页5年机器人SLAM答疑手册
另外,我们已经整理好了星球5年(2018-2022)的年度答疑精华手册(详见下),超干货独家重磅资料,总共940页,会员可免费领取!

下面介绍下我的机器人SLAM学习圈知识星球:
星球里都有啥?
星球会员可享受9大权益:
1、多位大佬坐镇,为成员答疑解惑
累计几万次答疑和评论交流

2、每日SLAM领域最新论文翻译、解析
知识星球内每天发布最新的定位、重建相关的论文、开源代码地址、主图,配中文翻译,方便大家第一时间掌握领域学术动态。

3、每日最新招聘信息
涵盖校招、社招、实习生

4、每日各大公司SLAM岗位笔试面试题
我们搜集了近期各大公司SLAM算法岗面试题,每天发布在星球内部,大家积极回答讨论交流。未来会汇总成册。
5、每月6/16/26日星主直播
每月6、16、26日星主都会做直播。有时候星主,有时候是邀请行业内大佬来做分享。内容涉及SLAM领域的学业、职场、创业、行业趋势/内幕等内容,已累计60+场。每次直播都会提前在星球内部及内部微信群通知,请留意,不要错过!下面是最近几次直播,星球成员可以看录播回放。
6、系统学习视频教程
我录制了基础入门学习视频。此外,我们组织星球里的优秀会员以学习小组的形式参与,并输出高质量系统性的原创学习视频。涉及如下专题:代码调试、OpenCV、PCL、G2O、Ceres、视觉SLAM十四讲、LVISAM、R3LIVE、语义SLAM、机器人学状态估计、GVINS、FAST-LIO2……
已经累计总共200+视频讲解
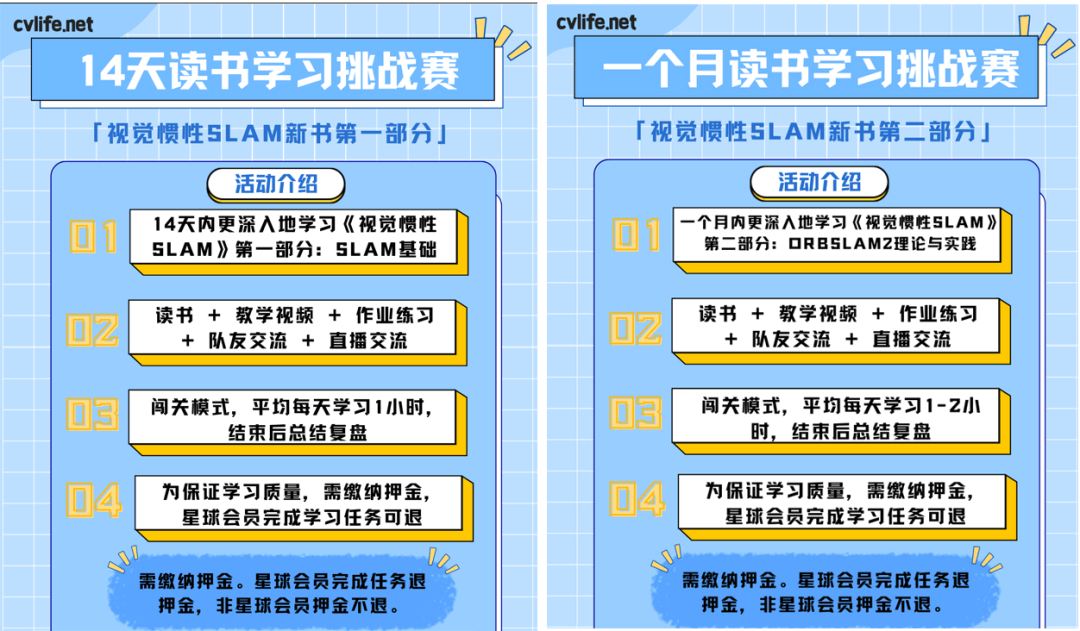
7、读书学习挑战赛
《视觉惯性SLAM:理论与源码解析》图书作者带领大家一起深入学习书籍。平均每天花费1-2小时时间,每天读书+视频学习+作业+最后复盘,一起努力,一起进步。
8、五年星球答疑精华手册近千页
我们已经整理好了星球5年(2018-2022)的年度答疑精华手册,超干货独家重磅资料,总共940页,会员可免费领取!
星球里积累了5年的干货,这里列举部分
9、线下交流会
全国各城市线下交流会(下图是3月深圳交流会),其他城市陆续准备中

我是小六,中科院博士毕业,计算机视觉life平台创始人,《视觉惯性SLAM:理论与源码解析》作者。感谢关注!
长按二维码,加入即可开始学习~3天内无条件退款
购买后务必加客服领取其他权益和加交流群
现在加入免费送近千页5年机器人SLAM答疑手册

注意,购买后务必加下面助理微信,进交流群,领取星球权益!
最后介绍一下我们最近的几个学习活动:
1、【挑战赛】10天从零上手ChatGPT
ChatGPT能提高工作学习效率10倍以上,本次挑战赛会系统教学ChatGPT的应用操作。是知识星球「小六的ChatGPT学习圈」的学习活动,该星球是ChatGPT及相关AIGC行业的交流学习社区。上课时间6月5-16日。详情点击 入局 ChatGPT!
2、【挑战赛】深入、系统学习ORB-SLAM2
如果刚刚参与了视觉惯性SLAM读书挑战赛第2部分,之后想要更仔细的学习ORB-SLAM2,欢迎参与深度系统的学习,第6期《视觉SLAM必学基础:ORB-SLAM2源码解析:从 理论到实战》,将于6月9日正式上课,逐行讲解代码,彻底搞懂ORB-SLAM2
3、【挑战赛】激光雷达惯性SLAM-FastLio2
FAST-LIO2是香港大学火星实验室(MARS)开源的代码,是一种具有高计算效率、高鲁棒性的雷达惯性里程计。它通过紧耦合误差状态卡尔曼滤波器实现IMU和激光雷达融合的状态估计,是目前最先进的开源LIO框架之一。
本次挑战赛由上海交通大学博士王泽霖博士带队,提供修改源代码,开源代码地址:https://github.com/zlwang7/S-FAST_LIO
详情点击:激光雷达惯性SLAM-FastLio2,一个月搞定!
4、【挑战赛】动态SLAM论文带学
动态SLAM是在动态环境中进行定位和建图的算法,它可以提高定位和建图的准确性,增强SLAM系统的鲁棒性,提供更丰富的环境理解,对于推动机器人技术的发展和实现真正的自主机器人具有重要的意义。
来啦!带你学动态SLAM论文!
5、【专场招聘会】计算机视觉life 联合 XREAL
计算机视觉life 联合 XREAL招聘交流会来啦!
长按二维码,加入即可开始学习~3天内无条件退款
购买后务必加客服领取其他权益和加交流群
现在加入免费送5年SLAM答疑精华手册(共938页)
学机器人SLAM/3D视觉,就上cvlife.net !
点击领取学习资料 → 机器人SLAM学习资料大礼包
技术交流群